Publications






Closing the Sim2Real Gap using Invertible Simulators
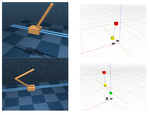
Employing robots in the real world to perform a large variety of tasks remains a great challenge to current perception, planning and control algorithms. Various specialized representations, such as for mapping or localization, have been proposed which are typically used in fixed pipelines that fuse perception, planning and control.