High-speed Safe Trajectory Planning in Confidence-rich Maps
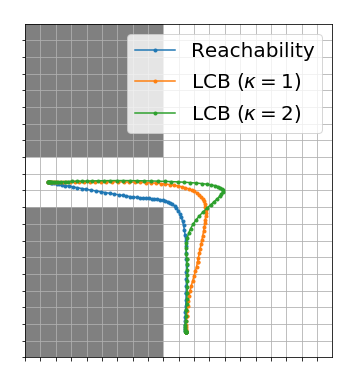 Resulting trajectories with our proposed Lower Confidence Bound (LCB) optimization objective.
Resulting trajectories with our proposed Lower Confidence Bound (LCB) optimization objective.Type
Publication
IROS Workshop on Vision-based Agile Autonomous Navigation of UAVs
Resulting trajectories with our proposed Lower Confidence Bound (LCB) optimization objective.