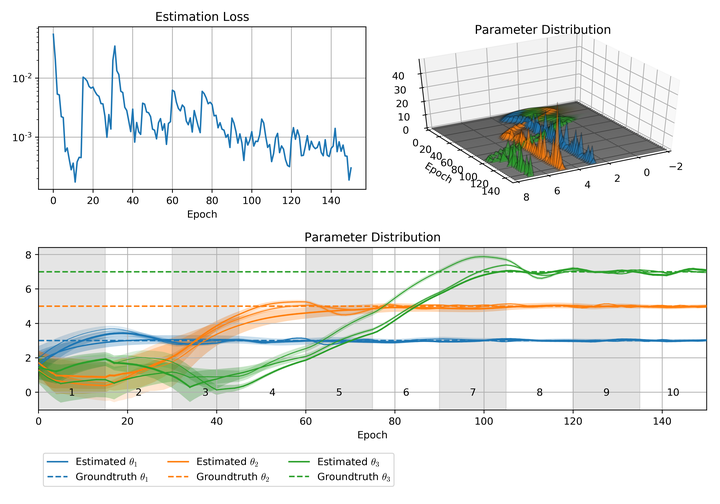
 Online probabilistic estimation of the lengths of a three-link compound pendulum using a Gaussian Mixture Model.
Online probabilistic estimation of the lengths of a three-link compound pendulum using a Gaussian Mixture Model.Abstract
Accurate simulations allow modern machine learning techniques to be applied to robotics problems, with sample-collection runtimes orders of magnitudes faster than the real world. Current reinforcement learning approaches require laborious manual calibration of carefully designed models, or, in a model-free context, vast amounts of training data to acquire such accurate models from real-world trials. In this work, we introduce a new layer in the deep learning toolbox that imposes a strong inductive bias to generate physically accurate predictions of rigid-body dynamics and allows for the automatic inference of system parameters given an ad-hoc model description.
Type
Publication
R:SS Workshop on Closing the Reality Gap in Sim2real Transfer for Robotic Manipulation