Augmenting Differentiable Simulators with Neural Networks to Close the Sim2Real Gap
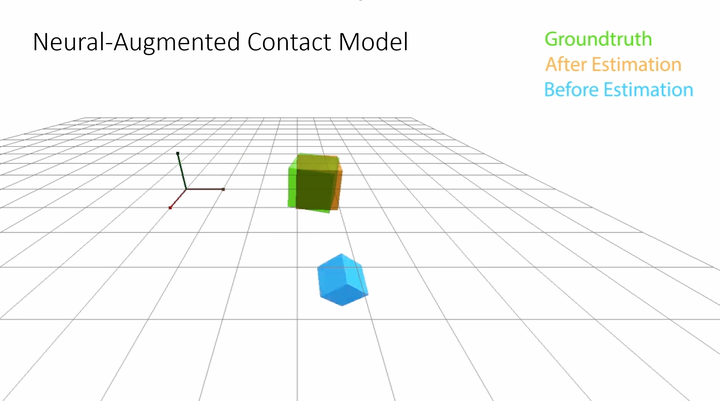 Force-based contact model augmented by a neural network
Force-based contact model augmented by a neural networkAbstract
We present a differentiable simulation architecture for articulated rigid-body dynamics that enables the augmentation of analytical models with neural networks at any point of the computation. Through gradient-based optimization, identification of the simulation parameters and network weights is performed efficiently in preliminary experiments on a real-world dataset and in sim2sim transfer applications, while poor local optima are overcome through a random search approach.
Type
Publication
R:SS 2020 Workshop on Closing the Reality Gap in Sim2Real Transfer for Robotics