Interactive Differentiable Simulation
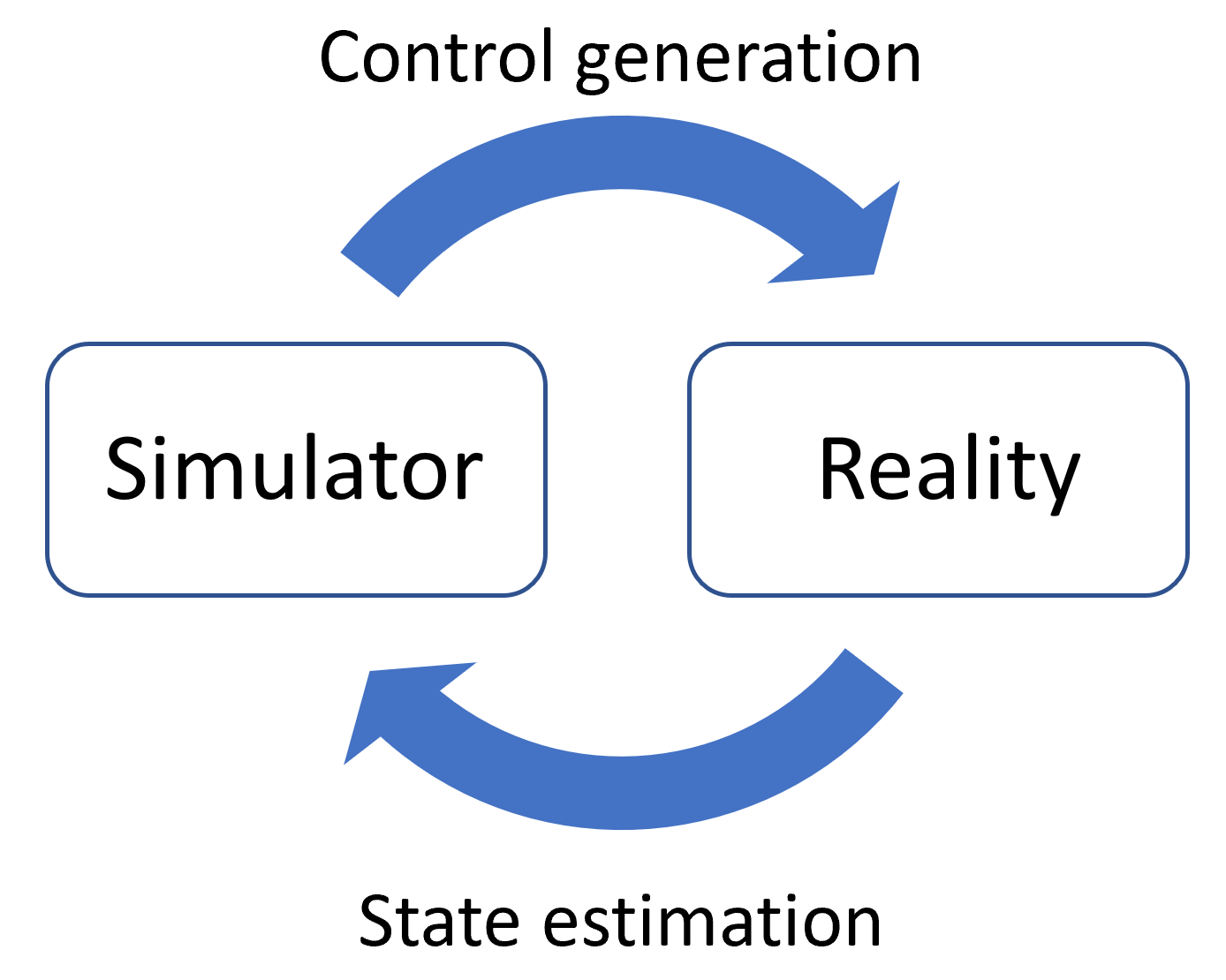
I am investigating how differentiable simulators can help us reduce the simulation-reality gap. The end-to-end differentiability of such simulators allows us to efficiently optimize their parameters, which means the physics engine can be incorporated into learning-based architectures. By augmenting the original physics engine with neural networks, even unmodeled effects can be captured by such learning-based simulator (see NeuralSim).
Eric Heiden
Research Scientist
My research interests include autonomous robots, simulators, and motion planning.
Publications
Grasp'D: Differentiable Contact-rich Grasp Synthesis for Multi-fingered Hands
Synthesize contact-rich grasps for multi-fingered hands via differentiable simulation

Inferring Articulated Rigid Body Dynamics from RGBD Video
We present a pipeline to learn simulators from depth or RGB video. The “URDF” of a mechanism is reconstructed, and the simulation parameters are inferred through Bayesian inference.
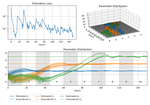
Probabilistic Inference of Simulation Parameters via Parallel Differentiable Simulation
Reducing the reality gap through a Bayesian inference algorithm that leverages massive GPU parallelism and differentiable simulators.

DiSECt: A Differentiable Simulation Engine for Autonomous Robotic Cutting
We introduce a differentiable simulator for robotic cutting. It achieves highly accurate predictions of the knife forces, optimizes cutting actions & more!
Best Student Paper at RSS 2021
Best Student Paper at RSS 2021

NeuralSim: Augmenting Differentiable Simulators with Neural Networks
Differentiable simulators provide an avenue for closing the sim-to-real gap by enabling the use of efficient, gradient-based …

Sparse-Input Neural Network Augmentations for Differentiable Simulators
Differentiable simulators provide an avenue for closing the sim2real gap by enabling the use of efficient, gradient-based optimization …

Closing the Sim2Real Gap using Invertible Simulators
Employing robots in the real world to perform a large variety of tasks remains a great challenge to current perception, planning and control algorithms. Various specialized representations, such as for mapping or localization, have been proposed which are typically used in fixed pipelines that fuse perception, planning and control.
Augmenting Differentiable Simulators with Neural Networks to Close the Sim2Real Gap
We present a differentiable simulation architecture for articulated rigid-body dynamics that enables the augmentation of analytical …

Automatic Differentiation and Continuous Sensitivity Analysis of Rigid Body Dynamics
A key ingredient to achieving intelligent behavior is physical understanding that equips robots with the ability to reason about the …
Physics-based Simulation of Continuous-Wave LIDAR for Localization, Calibration and Tracking
Light Detection and Ranging (LIDAR) sensors play an important role in the perception stack of autonomous robots, supplying mapping and …