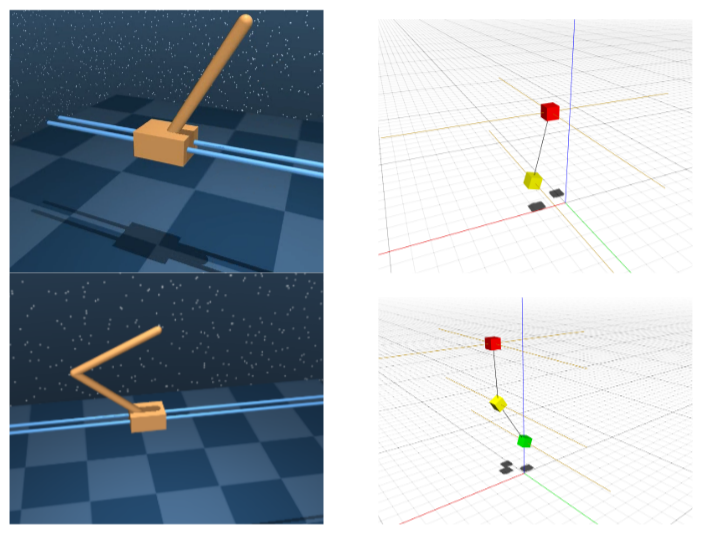
 Simulated cartpole systems in MuJoCo (left column) and our physics engine (right column).
Simulated cartpole systems in MuJoCo (left column) and our physics engine (right column).Abstract
A key ingredient to achieving intelligent behavior is physical understanding that equips robots with the ability to reason about the effects of their actions in a dynamic environment. Several methods have been proposed to learn dynamics models from data that inform model-based control algorithms. While such learning-based approaches can model locally observed behaviors, they fail to generalize to more complex dynamics and under long time horizons. In this work, we introduce a differentiable physics simulator for rigid body dynamics. Leveraging various techniques for differential equation integration and gradient calculation, we compare different methods for parameter estimation that allow us to infer the simulation parameters that are relevant to estimation and control of physical systems. In the context of trajectory optimization, we introduce a closed-loop model-predictive control algorithm that infers the simulation parameters through experience while achieving cost-minimizing performance.