Bench-MR: A Motion Planning Benchmark for Wheeled Mobile Robots
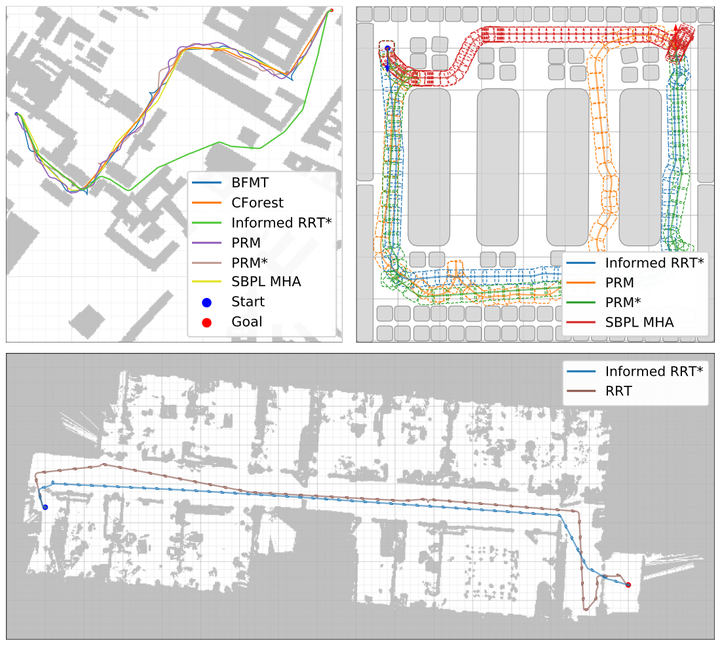 Selection of environment types supported in Bench-MR
Selection of environment types supported in Bench-MRAbstract
Planning smooth and energy-efficient motions for wheeled mobile robots is a central task in applications ranging from autonomous driving to service and intralogistic robotics. Over the past decades, a wide variety of sampling-based motion planners, extend functions, and path-improvement techniques have been proposed for such systems. Choosing the best combination of components that fit an application is a tedious task, even for expert users. With the goal of aiding researchers in designing novel planning algorithms and evaluating path finding solutions, we present Bench-MR: the first open-source sampling-based motion-planning benchmark designed for nonholonomic, wheeled mobile robots. Unlike related benchmarks, Bench-MR offers an extensive number and variety of algorithm families, post-smoothing techniques, steer functions, optimization criteria, complex environments resembling real-world applications (such as navigating warehouses, moving in cluttered cities and parking) and performance metrics that make it a comprehensive comparison and analysis framework. Bench-MR is easy to use and extend, and as shown in the detailed examples, it significantly helps practitioners and researchers to analyze and compare their work against the state of the art.