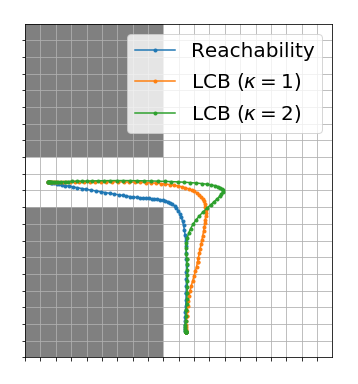
 Resulting trajectories with our proposed Lower Confidence Bound (LCB) optimization objective.
Resulting trajectories with our proposed Lower Confidence Bound (LCB) optimization objective.Abstract
Planning safe, high-speed trajectories in unknown environments remains a major roadblock on the way toward achieving fast autonomous flight. Current state-of-the-art planning approaches use sampling-based methods or trajectory optimization to obtain fast trajectories, whose safety is evaluated by taking into account the current state estimate of the environment. In unknown environments, however, this leads to numerous stops caused by the need for re-planning the trajectory due to unexpected obstacles. In this paper, we propose to use an active perception paradigm for planning. We predict the future uncertainty of the map and optimize trajectories to minimize re-planning risk. This leads to faster and safer trajectories. We evaluate the proposed planning approach in a series of simulation experiments, which show that we are able to achieve safer trajectories with a smaller number of re-planning stops and faster speeds.